Chapter 3.9
産業用ロボットの安全
以下に、ロボットアプリケーションにおける安全コンセプトに関する最も重要な情報をまとめました。危険へのアクセスを防止し、ロボットの動きを制限し、安全な人とロボットの相互作用を確保する方法を学びましょう。また、安全フェンス、先進的な検出システム、および共同作業スペースの計画の重要性についても触れます。
Chapter 3.9
以下に、ロボットアプリケーションにおける安全コンセプトに関する最も重要な情報をまとめました。危険へのアクセスを防止し、ロボットの動きを制限し、安全な人とロボットの相互作用を確保する方法を学びましょう。また、安全フェンス、先進的な検出システム、および共同作業スペースの計画の重要性についても触れます。
このインフォグラフィックは、産業用ロボットの安全距離について批判的に考える方法を示しています。防護柵がなぜ重要なのか、事故はどのように発生するのか、防護柵が唯一の解決策でない場合もあります。ロボットの周囲で人々の安全を守るための重要な考慮事項をご覧ください。
ロボットは非常に多用途で、経済的な自動化ソリューションを提供します。しかし、同時に非常に危険な場合もあります。
大きな高速ロボットは、圧迫や衝撃によって非常に重傷を引き起こす可能性があります。そのため、ロボットの安全は、(EN) ISO 10218-1および-2で国際的に標準化されており、アメリカ合衆国ではほぼ同一のANSI/RIA R15.06が適用されています。さらに、モバイルロボットのための標準もANSI/RIA R15.08で発表されています。以下にいくつかの重要な安全規則を示します。
ロボットの安全は、次の3つの要素で成り立ちます。
3つ目は、比較的新しい考え方で、しばしば「コラボレーティブロボット操作」と呼ばれます。これは、特別に設計されたロボットシステムとオペレーターが同じ作業空間または重なり合う作業空間で作業することを意味します。まず、コラボレーション作業空間と人間とロボットの望ましい相互作用を計画する必要があります。次に、リスクを特定し、適切な安全対策を実施します。
最先端の安全対策は、協働ロボット(「コボット」ともいいます)を使用することです。
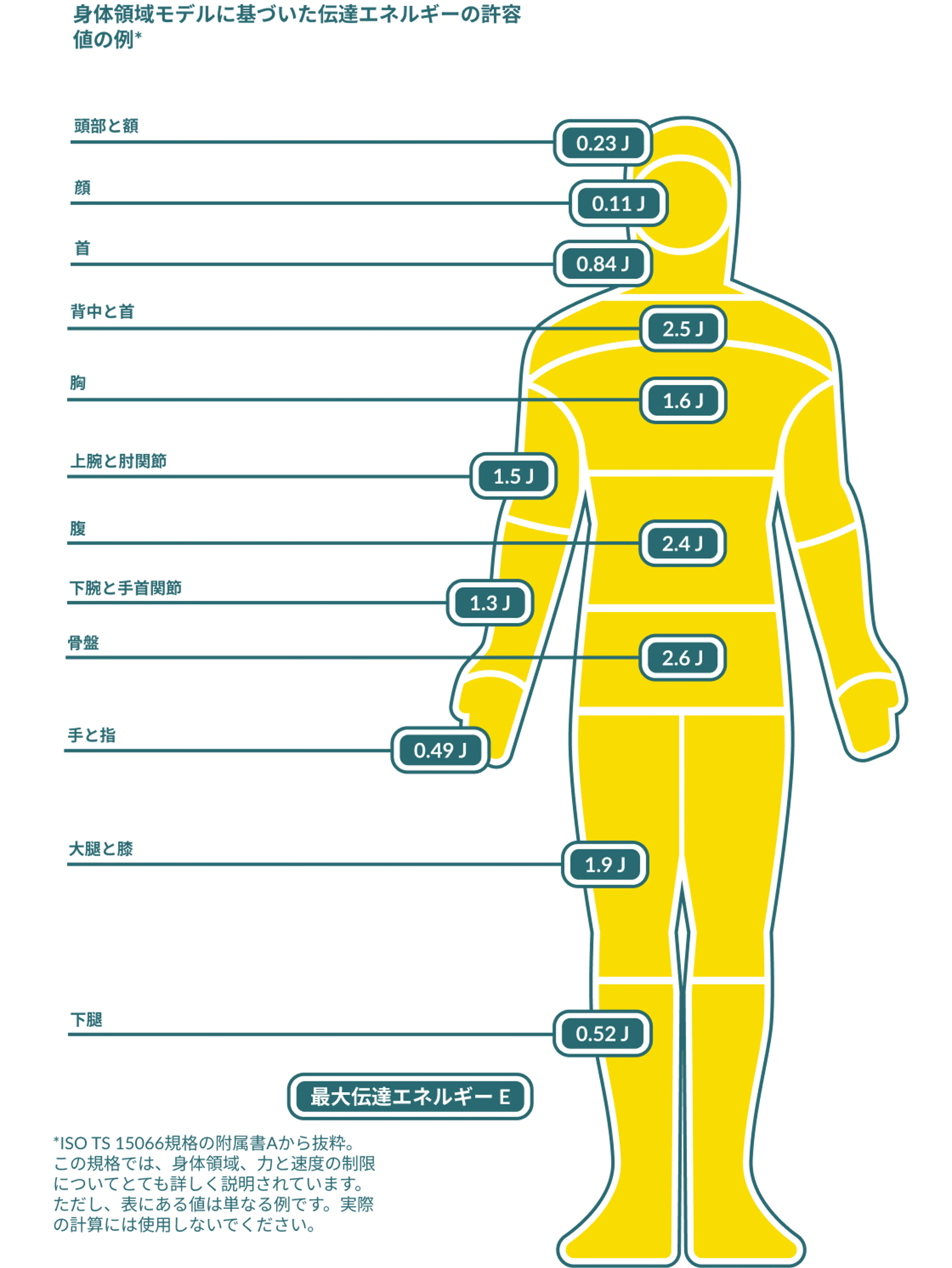
協働ロボットはコラボレーティブロボットは、限られた力と速度で動作します。人間が動いているコラボレーティブロボットに接触しても、怪我をすることはありませんが、多少の痛みを感じることはあります。何年にもわたる広範なテストにより、人間が機械部品と物理的に接触した際に耐えられる力、速度、エネルギーの限界がリスト化されています(ISO TS 15066参照)。
これらの制限内で移動する協働ロボットは、人間とロボットの相互作用に対して安全であると考えられます。ただし、そのようなアプリケーションが自動的に安全であることを意味するわけではありません。ロボットとロボットが扱うツール (エンド エフェクタ) の全体的なコンテキストを慎重に考慮する必要があります。
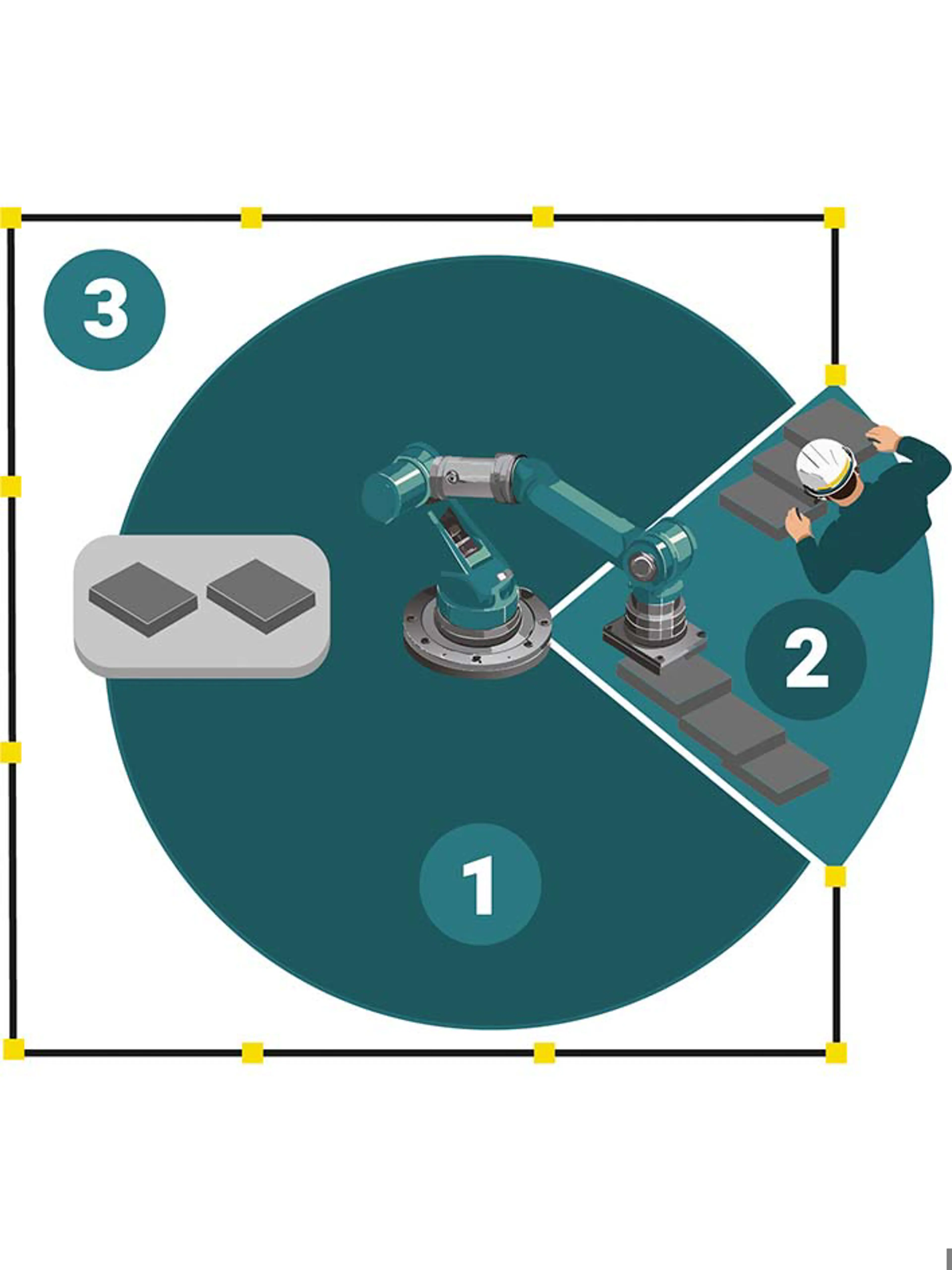
例:
グラフィックでは、人間のオペレーターとロボットが協働作業空間を共有しています。
安全対策
危険なロボットは、人が存在する場合、共同作業エリア内で動いてはならない。
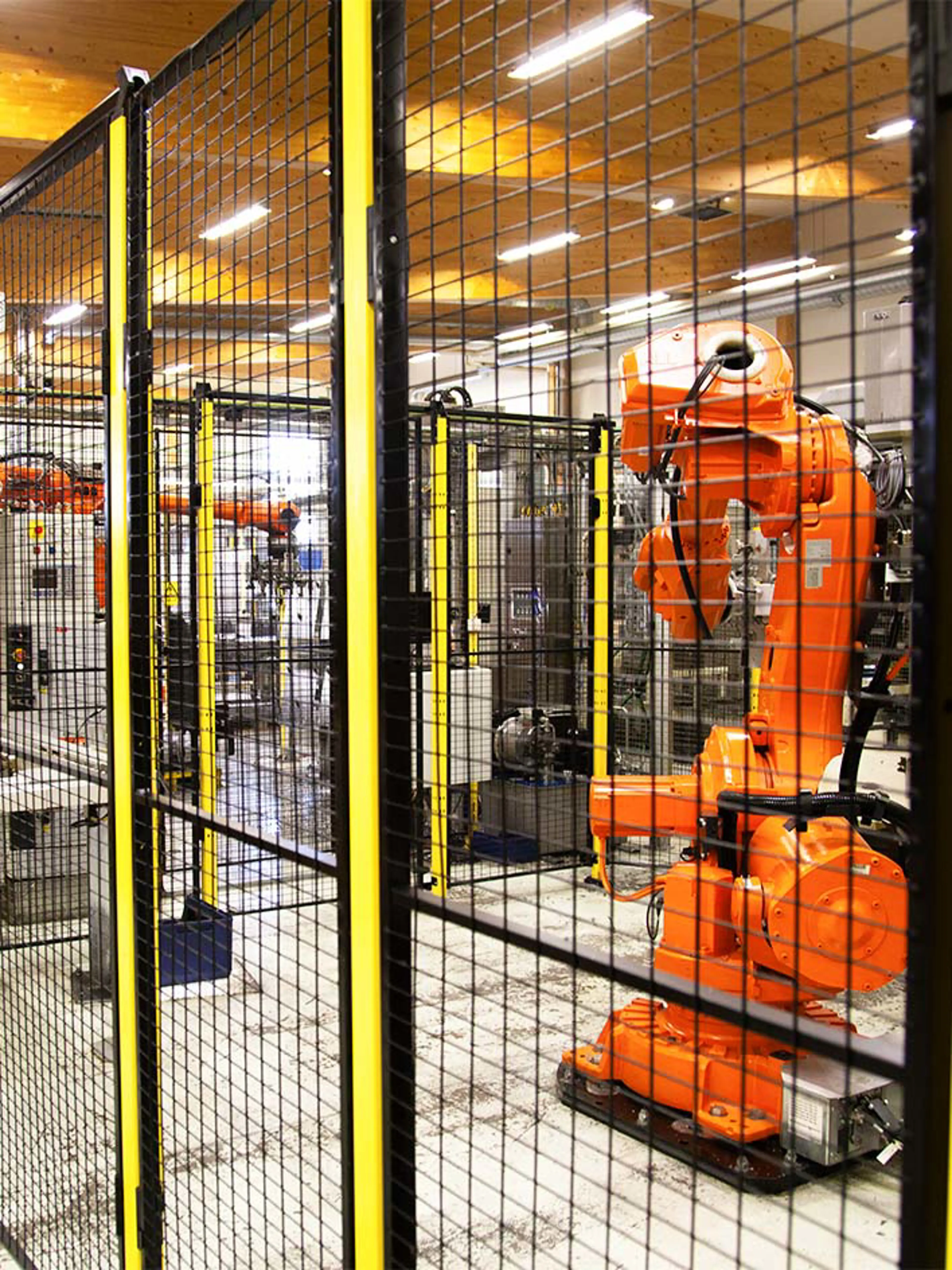
安全柵
ロボットの安全性は、安全柵とアクセスドアを備えた密閉された「セル」に大きく依存します。しかし、多くのアプリケーションでは、監視システムがさらに必要になるか、ロボットの「ケージ」に取って代わる場合もあります。
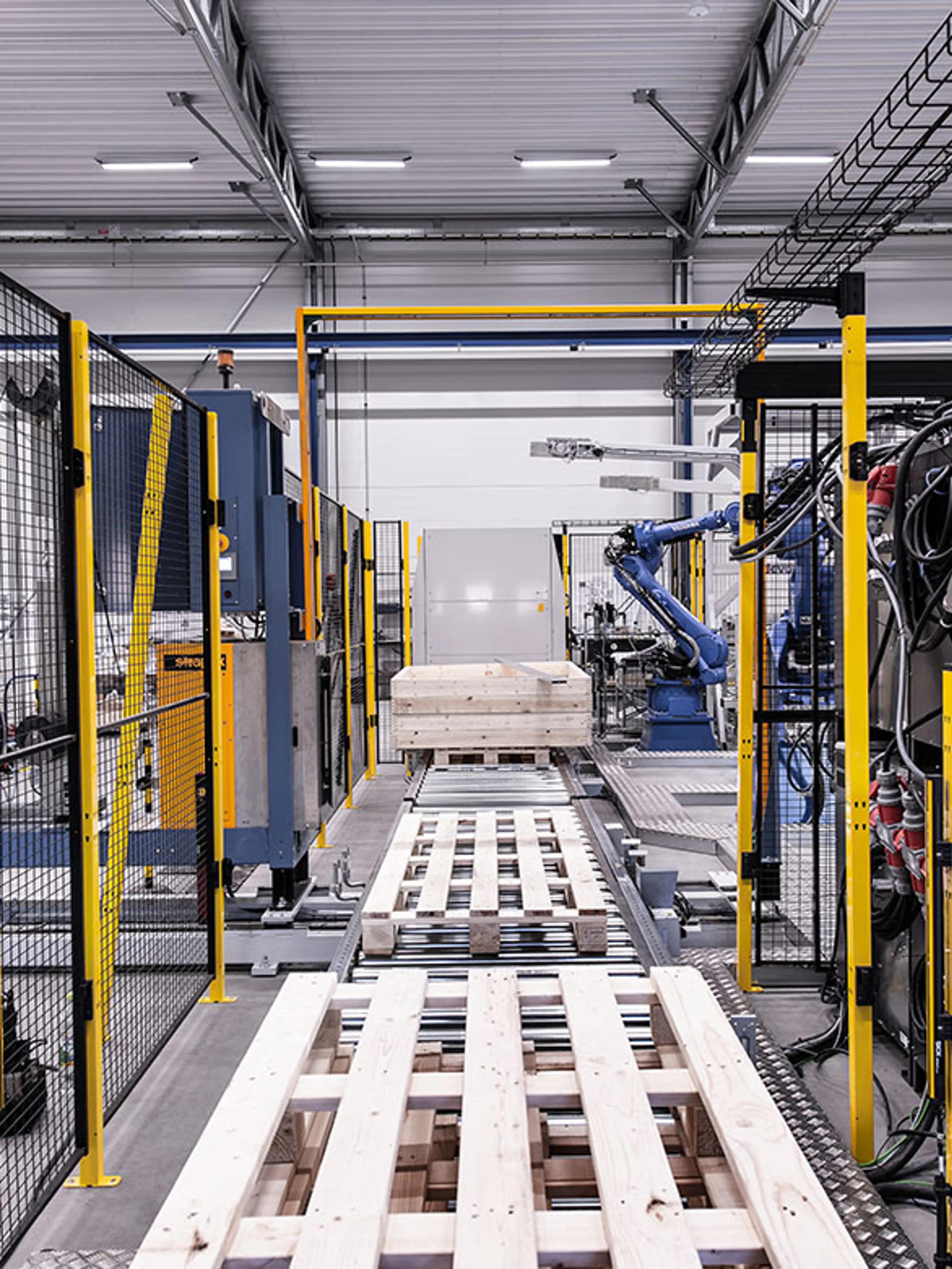
高度な検出システム:
検知装置の後ろの危険エリア内に人が残っていないか注意してください。そのような可能性がある場合は、追加の安全対策が必要になる場合があります。

柵は「安全保護空間」を作るために使用してもかまいませんが、「制限された空間」を作るために使用すべきではありません。
ロボットが高速度または大きな力で柵に衝突すると、いくら頑丈なフェンスであっても変形し、安全上の危険をもたらす可能性があります。さらに、柵は隙間から指を入れた場合、怪我のリスクを高める可能性があります。これらの問題を軽減するために、制限された空間と柵の間に最低でも120〜200mmの隙間を維持する必要があります。安全柵の適切な高さと距離を計算して決定する方法については、チャプター3.2「機械ガードの選定」をご覧ください。
したがって、いわゆる「ロボットの安全柵」だけに依存するのは不十分です。代わりに、安全を確保するために、以下のような適切な制限装置を導入する必要があります。
安全柵は人間を外に閉め出しておくためのものであり、ロボットを中に閉じ込めるためのものではありません。

多くの人が「ロボット安全」フェンスを求めたり、フェンスメーカーの衝撃耐性テスト結果(2000ジュール以上の耐久性)を訪ねたりします。
しかし、このような考え方自体がロボット安全に関する誤解を示しています。ロボットの安全基準では、フェンシングやその他の保護装置ではなく、別の手段でロボットの動作範囲を制限することが求められています。
ロボットの動作範囲は、そのサイズによって異なります。多くの場合、ロボットの「最大空間」は実際の作業に必要なスペースよりもはるかに大きくなります。システム設計者はできるだけ少ない床面積で作業を行いたいため、ロボットはより小さな「制限空間」内で動作するようにプログラムされます。そして、その制限空間の周囲に、フェンス、ライトカーテン、範囲スキャナーを使用して「保護空間」を定義し、人が立ち入ることを防ぎます。
しかし、制限空間と保護空間の間には、ほぼ必ず安全距離が必要になります。なぜでしょうか?
それは、ライトバリア、スキャナー、カメラ、またはドアスイッチなどの検出装置によって人の侵入が検知された際、ロボットが減速し完全に停止するための時間が必要だからです。